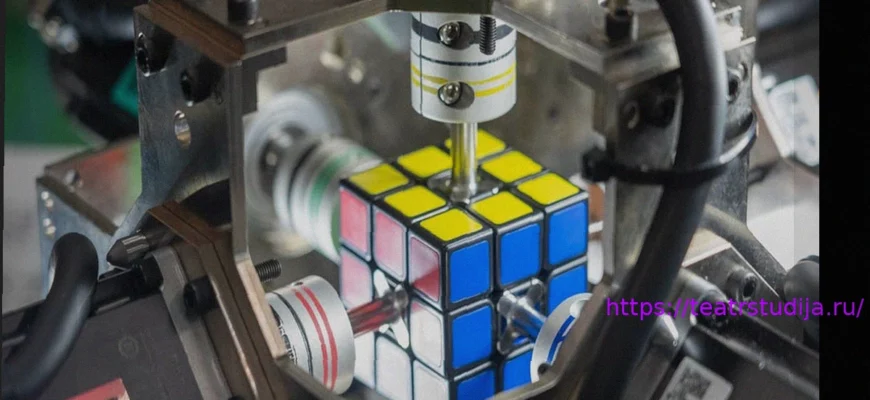
Введение небольшой доли случайности в движение роботов позволяет избежать заторов в их роях. Этот «шум» способствует самоорганизации роботов и повышению эффективности выполнения задач в условиях тесноты.
Вас приветствует подборка материалов и визуализаций

Искусственный интеллект (ИИ) развивается с разной скоростью

Технологические эксперты прогнозируют, что в течение

Руководитель британского агентства кибербезопасности

Уволенный государственный служащий признал «дискуссию»

Нельзя убить то, что уже мертво. Новые детали о провальном

Российская армия, участвующая в конфликте на Украине

Кухня обретает новые очертания, становясь все более