Перспективы длительных полетов на скоростях, многократно превышающих звуковые, обещают значительные преимущества. Однако достижение таких высот напрямую зависит от разработки высокоэффективных прямоточных двигателей – задачи исключительной сложности. Инженеры и ученые по всему миру активно работают над поиском разнообразных решений для преодоления этих технических барьеров. В данной статье мы рассмотрим текущие направления их исследований.

Принцип действия прямоточных двигателей
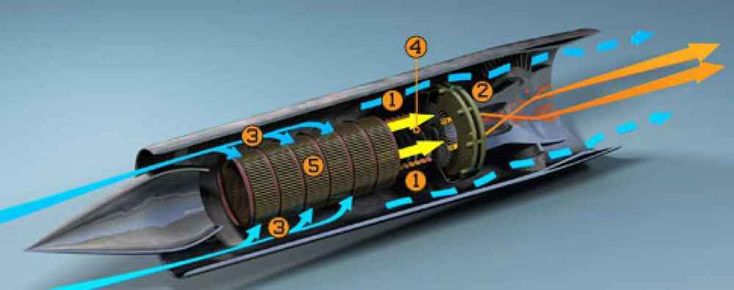
Прямоточный воздушно-реактивный двигатель (ПВРД) представляет собой, по сути, открытую трубу с более узкой центральной частью, где происходит процесс горения. В отличие от традиционных турбореактивных двигателей, ПВРД не использует механические компрессоры; вместо этого нагнетание воздуха осуществляется за счет его высокой скорости встречного потока. Воздух поступает во входное устройство, где благодаря сужению канала он сжимается до условий, необходимых для воспламенения. Затем в этот сжатый воздух впрыскивается и сжигается топливо. Образовавшиеся в результате горения газы, нагретые до нескольких тысяч градусов Цельсия, расширяются в реактивном сопле, создавая мощную тягу.
Ключевым условием для эффективного горения в двигателе является сжатие поступающего воздушного потока. Механизмы сжатия воздуха за счет скорости существенно различаются, причём эти различия могут достигать десятков и даже сотен раз. Разделительной линией в этом процессе служит скорость звука, которая не является константой и зависит от температуры окружающей среды (увеличивается при нагреве, уменьшается при охлаждении). Таким образом, за ориентир берется локальная скорость звука для конкретных условий. Все, что превышает эту скорость, считается сверхзвуковым (поток, полет, объект), а все, что ниже, – дозвуковым. Дозвуковой поток при обтекании препятствия сжимается незначительно. На малых скоростях воздух практически не сжимается вокруг объекта. При достижении половины скорости звука сжатие составляет 30–50%, а при 80% скорости звука – до 70–80%. Однако при переходе за звуковой барьер воздух резко меняет свои свойства, становясь значительно более податливым к сжатию, которое может увеличиваться в разы и даже десятки раз. Сверхзвуковой режим выступает как высокоэффективный механизм компрессии, способный уплотнять поток практически без ограничений.
Почему так важно сжимать воздух в двигателе? Сжатый воздух содержит значительно больше молекул кислорода на единицу объема, что позволяет сжигать больше топлива и, соответственно, выделять больше тепловой энергии. В условиях повышенной концентрации кислорода многократно сжатого воздуха эффективно сгорают различные виды авиационного топлива.
Дозвуковые прямоточные двигатели демонстрируют низкую эффективность вследствие недостаточного сжатия воздуха. Гораздо более перспективными являются сверхзвуковые прямоточные двигатели (СПВРД), где входящий поток может быть сжат в несколько раз или даже в десятки раз, при условии достаточной скорости аппарата и наличия соответствующей сужающейся геометрии входного канала – конфузора.
Поступающий в двигатель воздух, под воздействием инерционных сил, `вдавливается` в воронкообразное входное устройство, что приводит к замедлению потока. Сжатие происходит за счет снижения скорости и преобразования кинетической энергии потока в потенциальную энергию сжатия и тепловую энергию. Чем интенсивнее замедление, тем сильнее сжатие и нагрев, однако следует учитывать неизбежные газодинамические потери, которые снижают реальные показатели по сравнению с идеальными. Сверхзвуковой воздухозаборник имеет острые кромки, от которых под углом расходятся косые скачки уплотнения. В этих скачках воздух мгновенно сжимается и продолжает движение уже в уплотненном состоянии. Для максимальной эффективности необходимо, чтобы в горловину воздухозаборника поступал исключительно воздух, сжатый этими скачками. Поскольку угол отклонения скачков уплотнения зависит от скорости полета, изменение скорости напрямую влияет на процесс сжатия в конфузоре. Для поддержания оптимального сжатия при меняющихся режимах полета сверхзвуковые воздухозаборники должны быть оснащены системой управления геометрией, что позволяет адаптировать параметры потока в двигателе к различным условиям движения.
Таким образом, сверхзвуковой поток воздуха замедляется внутри конфузора. В некоторых случаях это замедление может привести к снижению скорости потока ниже звуковой, что делает течение в центральной части двигателя дозвуковым. В такой дозвуковой зоне эффективно функционируют стандартные камеры сгорания, аналогичные тем, что используются в турбореактивных двигателях. В сужающейся части сопла поток снова достигает звуковой скорости, а затем, расширяясь, ускоряется до сверхзвуковых значений, создавая реактивную тягу. Такой тип двигателя называется сверхзвуковым прямоточным воздушно-реактивным двигателем (СПВРД), характеризующимся сверхзвуковым потоком на входе и выходе, но дозвуковым в области горения. СПВРД успешно применяются в различных сверхзвуковых ракетах, включая зенитные и крылатые. Хотя СПВРД значительно превосходит дозвуковые ПВРД благодаря эффективному сверхзвуковому сжатию, он уступает другому типу двигателей, где поток остается сверхзвуковым на всех участках проточной части, хоть и с разной скоростью.
Основным недостатком СПВРД является наличие дозвуковой зоны, которая начинается с прямого (перпендикулярного потоку) и интенсивного скачка уплотнения, завершающего сверхзвуковой участок. В этом скачке происходят самые значительные газодинамические потери энергии потока, что существенно снижает общую эффективность двигателя. Этот процесс можно образно сравнить с движением `на месте`: поток сначала замедляется до дозвуковой скорости, а затем вновь разгоняется до сверхзвуковой, теряя при этом значительную часть своей энергии.

При увеличении скорости входящего потока до 6–7 Махов (гиперзвуковых скоростей) необходимое для горения сжатие воздуха достигается уже в условиях сверхзвукового течения внутри двигателя. В этом случае дальнейшее избыточное сжатие и торможение потока становятся нецелесообразными. Задача сводится к эффективному сжиганию топлива в сверхзвуковом потоке и последующему ускорению горячих газов в сверхзвуковом сопле. Такой двигатель называется гиперзвуковым прямоточным воздушно-реактивным двигателем (ГПВРД).
В условиях ГПВРД теряется ключевое преимущество дозвуковой зоны СПВРД, где пламя за форсунками горит стабильно и управляемо. Это обусловлено тем, что в дозвуковом режиме процессы горения зависят от теплопроводности и турбулентного перемешивания, обеспечивающих передачу тепла и распространение огня по топливовоздушной смеси, что упрощает управление двигателем. Сверхзвуковое горение существенно отличается. Сверхзвуковой поток с огромной скоростью уносит привычные формы пламени. Теплопроводность от факела не успевает прогреть новые слои смеси до температуры воспламенения, и они покидают двигатель несгоревшими. В направлении, противоположном сверхзвуковому потоку, распространяется лишь детонация – ударно-волновая форма горения. В этом случае скачок уплотнения, связанный со сверхзвуковой ударной волной, сжимает и нагревает смесь до температуры воспламенения, после чего топливо сгорает непосредственно за скачком. Теоретически, `закрепив` эту волну в определенной части канала путем выравнивания скоростей потока и волны, можно создать стабильную камеру сгорания.
Вызовы стабильности горения и функционирования ГПВРД
Управление сверхзвуковым горением представляет собой чрезвычайно сложную задачу. Причины кроются в экстремально высокой скорости потока, минимальном времени пребывания топливовоздушной смеси в камере сгорания (менее десятитысячной доли секунды) и, соответственно, крайне коротком времени самого горения. Для эффективного управления необходимо мгновенно поддерживать оптимальные значения множества взаимосвязанных параметров потока: скорости, плотности, давления, температуры и концентрации топлива. Формирование горючей смеси происходит не мгновенно, и за форсунками возникают зоны с различной концентрацией топливовоздушной смеси, создавая неравномерное пространственное распределение топлива. Как в таких условиях поведет себя детонационная волна горения? Её фронт будет искажаться из-за неоднородности смеси, теряя стабильность. Чрезвычайно трудно своевременно отреагировать на эти непредвиденные изменения фронта волны, корректируя подачу топлива. Проблема усугубляется тем, что возмущения в центральной части потока не сразу достигают стенок канала, где расположены датчики. К тому моменту, как сигнал об изменениях достигнет датчика, высокоскоростной поток уже унесет эти негативные отклонения в зону горения, что может привести к его прекращению.

Если же скорость потока внутри двигателя превышает звуковую в 5 и более раз, горение переходит в гиперзвуковой режим. Например, если входящий поток имеет скорость 10 Махов и теряет 4 Маха на сжатие, то в проточной части остаётся скорость 6 Махов. Чем выше изначальная скорость полета, тем большая скорость сохраняется в двигателе после сжатия. В таких условиях избыточное торможение и сжатие становятся ненужными, поскольку топливо уже может эффективно сгорать в существующем потоке. В наиболее высокоскоростных и высотных модификациях ГПВРД поток остается гиперзвуковым на протяжении всей проточной части. Этот режим считается наиболее экономичным для крайне высоких скоростей и больших высот. Течение со скоростью 5 Махов внутри двигателя соответствует полету аппарата со скоростью от 8 до 17 Махов.
Гиперзвуковое течение представляет собой крайне сложную совокупность взаимосвязанных процессов, в которой перестают действовать фундаментальные законы идеального газа, поскольку газ в таких условиях уже не является идеальным. Доминирующую роль начинают играть неравновесные состояния – быстропротекающие переходные и прочие процессы, которые в обычных условиях незначительны. Их значимость возрастает из-за чрезвычайно малого времени протекания явлений: порция гиперзвукового потока проходит камеру сгорания менее чем за десятитысячную долю секунды. За это кратчайшее время неравновесные и переходные состояния успевают проявиться во всем своем комплексе, определяя общую картину течения. Эту сложную смесь взаимосвязанных физических и химических явлений можно представить как многослойную динамичную структуру из быстроменяющихся и нестабильных состояний. Эта `пространственная ткань` постоянно вибрирует в миллисекундных интервалах и колеблется волнами различных форм и масштабов. Оказать направленное воздействие на такую систему в одном месте и получить предсказуемый эффект в другом — задача огромной сложности. Управляющее воздействие теряется на фоне хаотических высокочастотных флуктуаций миллионов процессов, приводя к нечеткому и непредсказуемому результату.
Совокупность этих факторов делает разработку гиперзвукового двигателя чрезвычайно сложным предприятием. Проблема заключается как в сложности моделирования и расчета многообразия протекающих процессов, так и в необходимости моментального контроля ситуации в потоке. Отправка сигнала к датчикам, последующая молниеносная обработка данных, а затем мгновенное выполнение команд топливной системой — все эти этапы занимают время, которое в гиперзвуковых условиях оказывается слишком большим. В результате форсунки будут реагировать на уже изменившуюся ситуацию, а точное прогнозирование развития событий затруднено из-за огромного количества постоянно меняющихся, зачастую хаотичных, процессов и состояний.
Тем не менее, возможность освоить полеты на высотах 30–40 км со скоростью 10–15 Махов остается крайне привлекательной. Потенциал применения таких технологий огромен: от военного использования и разведки до гражданских пассажирских перевозок и многого другого. Именно поэтому разработка гиперзвуковых двигателей продолжается с неослабевающим упорством, и ученые активно ищут пути к созданию высокоэффективных ГПВРД.
Адаптивная геометрия проточной части
Как уже упоминалось, управляемый воздухозаборник предназначен для оптимизации поступления сверхзвукового потока в двигатель. При этом конфигурация сужающейся проточной части определяет степень сжатия потока…